Real Time Systems
Real-Time Concepts for Embedded Systems #1
Real-Time Embedded Systems
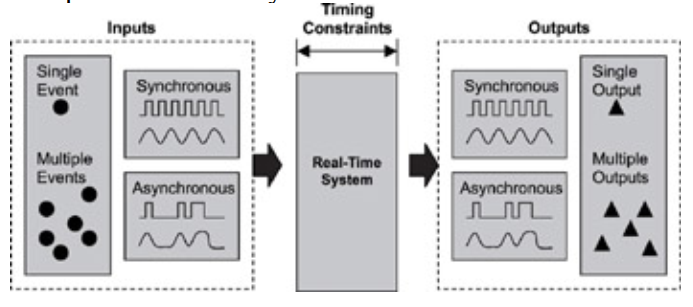
In the simplest form, real-time systems can be defined as those systems that respond to external events in a timely fashion. The response time is guaranteed.
External events can have synchronous or asynchronous characteristics. Responding to external events includes:
recognizing when an event occurs,
performing the required processing as a result of the event,
outputting the necessary results within a given time constraint.
Timing constraints include finish time, or both start time and finish time.
A good way to understand the relationship between real-time systems and embedded systems is to view them as two intersecting circles.

It can be seen that not all embedded systems exhibit real-time behaviors nor are all real-time systems embedded. However, the two systems are not mutually exclusive, and the area in which they overlap creates the combination of systems known as real-time embedded systems.
Real-time embedded systems are those embedded system with real-time behaviors.
Real-Time Systems
The environment of the real-time system creates the external events. These events are received by one or more components of the real-time system. The response of the real-time system is then injected into its environment through one or more of its components. Decomposition of the real-time system leads to the general structure of real-time systems.
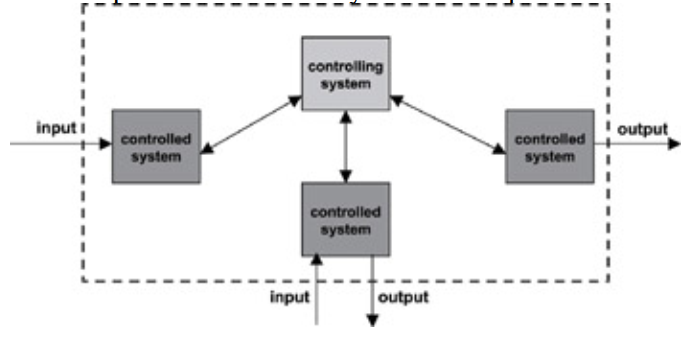
Structure of Real-Time System
The structure of a real-time system is consisting of
Controlling System
Controlled Systems (at least one)
The controlling system interacts with the controlled system in various ways
First, the interaction can be periodic, in which communication is initiated from the controlling system to the controlled system. In this case, the communication is predictable and occurs at predefined intervals.
Second, the interaction can be aperiodic, in which communication is initiated from the controlled system to the controlling system. In this case, the communication is unpredictable and is determined by the random occurrences of external events in the environment of the controlled system.
Finally, the communication can be a combination of both types. The controlling system must process and respond to the events and information generated by the controlled system in a guaranteed time frame.
Real-Time System Examples
Weapons Defense System
Imagine a real-time weapons defense system whose role is to protect a naval destroyer by shooting down incoming missiles. The idea is to shred an incoming missile into pieces with bullets before it reaches the ship.
The weapons system is comprised of
Radar System. (Controlled System)
Command-and-Decision (C&D) System. (The Controlling System)
Weapons Firing Control System. (Controlled System)
The working scenario of the system would be as follow:
The radar system scans and searches for potential targets. Coordinates of a potential target are sent to the C&D system periodically with high frequency after the target is acquired.
The C&D system must first determine the threat level by threat classification and evaluation, based on the target information provided by the radar system. If a threat is imminent, the C&D system must, at a minimum, calculate the speed and flight path or trajectory, as well as estimate the impact location. Because a missile tends to drift off its flight path with the degree of drift dependent on the precision of its guidance system, the C&D system calculates an area (a box) around the flight path.
The C&D system then activates the weapons firing control system closest to the anticipated impact location and guides the weapons system to fire continuously within the moving area or box until the target is destroyed. The weapons firing control system is comprised of large-caliber, multi-barrel, high-muzzle velocity, high-power machine guns.
In this weapons defense system example, the communication between the radar system and the C&D system is aperiodic, because the occurrence of a potential target is unpredictable and the potential target can appear at any time. The communication between the C&D system and the weapons firing control system is, however, periodic because the C&D system feeds the firing coordinates into the weapons control system periodically (with an extremely high frequency). Initial firing coordinates are based on a pre-computed flight path but are updated in real-time according to the actual location of the incoming missile.
Cruise Missile Guidance System
Consider another example of a real-time system-the cruise missile guidance system. A cruise missile flies at subsonic speed. It can travel at about 10 meters above water, 30 meters above flat ground, and 100 meters above mountain terrains. A modern cruise missile can hit a target within a 50-meter range.
All these capabilities are due to the high-precision, real-time guidance system built into the nose of a cruise missile.
In a simplified view, the guidance system is comprised of
The Radar System. (both forward-looking and look-down radars)
The Navigation System.
The divert-and-altitude-control System.
The navigation system contains digital maps covering the missile flight path.
The forward-looking radar scans and maps out the approaching terrains. This information is fed to the navigation system in real time. The navigation system must then recalculate flight coordinates to avoid terrain obstacles. The new coordinates are immediately fed to the divert-and-altitude-control system to adjust the flight path.
The look-down radar periodically scans the ground terrain along its flight path. The scanned data is compared with the estimated section of the pre-recorded maps. Corrective adjustments are made to the flight coordinates and sent to the divert-and-altitude-control system if data comparison indicates that the missile has drifted off the intended flight path.
In this example, the controlling system is the navigation system. The controlled systems are the radar system and the divert-and-altitude-control system. We can observe both periodic and aperiodic communications in this example. The communication between the radars and the navigation system is aperiodic. The communication between the navigation system and the diver-and-altitude-control system is periodic.
DVD Player
The DVD player must decode both the video and the audio streams from the disc simultaneously.
While a movie is being played, the viewer can activate the on-screen display using a remote control. On-screen display is a user menu that allows the user to change parameters, such as the audio output format and language options.
The DVD player is the controlling system, and the remote control is the controlled system. In this case, the remote control is viewed as a sensor because it feeds events, such as pause and language selection, into the DVD player.
Characteristics of Real-Time Systems
The C&D system in the weapons defense system must calculate the anticipated flight path of the incoming missile quickly and guide the firing system to shoot the missile down before it reaches the destroyer. Assume T1 is the time the missile takes to reach the ship and is a function of the missile's distance and velocity. Assume T2 is the time the C&D system takes to activate the weapons firing control system and includes transmitting the firing coordinates plus the firing delay. The difference between T1 and T2 is how long the computation may take. The missile would reach its intended target if the C&D system took too long in computing the flight path. The missile would still reach its target if the computation produced by the C&D system was inaccurate.
The navigation system in the cruise missile must respond to the changing terrain fast enough so that it can re-compute coordinates and guide the altitude control system to a new flight path. The missile might collide with a mountain if the navigation system cannot compute new flight coordinates fast enough, or if the new coordinates do not steer the missile out of the collision course.
Therefore, we can extract two essential characteristics of real-time systems from the examples given earlier. These characteristics are:
real-time systems must produce correct computational results, called logical or functional correctness
these computations must conclude within a predefined period, called timing correctness
Real-time systems are defined as those systems in which the overall correctness of the system depends on both the functional correctness and the timing correctness. The timing correctness is at least as important as the functional correctness.
It is important to note that we said the timing correctness is at least as important as the functional correctness. In some real-time systems, functional correctness is sometimes sacrificed for timing correctness.
Similar to embedded systems, real-time systems also have substantial knowledge of the environment of the controlled system and the applications running on it. This reason is one why many real-time systems are said to be deterministic, because in those real-time systems, the response time to a detected event is bounded. The action (or actions) taken in response to an event is known a priori.
A deterministic real-time system implies that each component of the system must have a deterministic behavior that contributes to the overall determinism of the system. As can be seen, a deterministic real-time system can be less adaptable to the changing environment. The lack of adaptability can result in a less robust system. The levels of determinism and of robustness must be balanced. The method of balancing between the two is system- and application-specific.
Hard and Soft Real-Time Systems
In the previous section, we said computation must complete before reaching a given deadline. In other words, real-time systems have timing constraints and are deadline-driven. Real-time systems can be classified, therefore, as
Hard real-time systems
Soft real-time systems
What differentiates hard real-time systems and soft real-time systems are the degree of tolerance of missed deadlines, usefulness of computed results after missed deadlines, and severity of the penalty incurred for failing to meet deadlines.
For hard real-time systems, the level of tolerance for a missed deadline is extremely small or zero tolerance. The computed results after the missed deadline are likely useless for many of these systems. The penalty incurred for a missed deadline is catastrophe. For soft real-time systems, however, the level of tolerance is non-zero. The computed results after the missed deadline have a rate of depreciation. The usefulness of the results does not reach zero immediately passing the deadline, as in the case of many hard real-time systems. The physical impact of a missed deadline is non-catastrophic.
A hard real-time system is a real-time system that must meet its deadlines with a near-zero degree of flexibility. The deadlines must be met, or catastrophes occur. The cost of such catastrophe is extremely high and can involve human lives. The computation results obtained after the deadline have either a zero-level of usefulness or have a high rate of depreciation as time moves further from the missed deadline before the system produces a response.
A soft real-time system is a real-time system that must meet its deadlines but with a degree of flexibility. The deadlines can contain varying levels of tolerance, average timing deadlines, and even statistical distribution of response times with different degrees of acceptability. In a soft real-time system, a missed deadline does not result in system failure, but costs can rise in proportion to the delay, depending on the application.
Missed Deadline Penalty
Penalty is an important aspect of hard real-time systems for several reasons.
What is meant by 'must meet the deadline'?
It means something catastrophic occurs if the deadline is not met. It is the penalty that sets the requirement.
Missing the deadline means a system failure, and no recovery is possible other than a reset, so the deadline must be met. Is this a hard real-time system?
That depends. If a system failure means the system must be reset but no cost is associated with the failure, the deadline is not a hard deadline, and the system is not a hard real-time system. On the other hand, if a cost is associated, either in human lives or financial penalty such as a $50 million lawsuit, the deadline is a hard deadline, and it is a hard real-time system. It is the penalty that makes this determination.
What defines the deadline for a hard real-time system?
It is the penalty. For a hard real-time system, the deadline is a deterministic value, and, for a soft real-time system, the value can be estimation.
One thing worth noting is that the length of the deadline does not make a real-time system hard or soft, but it is the requirement for meeting it within that time.
The weapons defense and the missile guidance systems are hard real-time systems. Using the missile guidance system for an example, if the navigation system cannot compute the new coordinates in response to approaching mountain terrain before or at the deadline, not enough distance is left for the missile to change altitude. This system has zero tolerance for a missed deadline. The new coordinates obtained after the deadline are no longer useful because at subsonic speed the distance is too short for the altitude control system to navigate the missile into the new flight path in time. The penalty is a catastrophic event in which the missile collides with the mountain. Similarly, the weapons defense system is also a zero-tolerance system. The missed deadline results in the missile sinking the destroyer, and human lives potentially being lost. Again, the penalty incurred is catastrophic.
On the other hand, the DVD player is a soft real-time system. The DVD player decodes the video and the audio streams while responding to user commands in real time. The user might send a series of commands to the DVD player rapidly causing the decoder to miss its deadline or deadlines. The result or penalty is momentary but visible video distortion or audible audio distortion. The DVD player has a high level of tolerance because it continues to function. The decoded data obtained after the deadline is still useful.
Hard Real-Time System Corrective Actions
Timing correctness is critical to most hard real-time systems. Therefore, hard real-time systems make every effort possible in predicting if a pending deadline might be missed. Returning to the weapons defense system, let us discuss how a hard real-time system takes corrective actions when it anticipates a deadline might be missed. In the weapons defense system example, the C&D system calculates a firing box around the projected missile flight path. The missile must be destroyed a certain distance away from the ship or the shrapnel can still cause damage. If the C&D system anticipates a missed deadline (for example, if by the time the precise firing coordinates are computed, the missile would have flown past the safe zone), the C&D system must take corrective action immediately. The C&D system enlarges the firing box and computes imprecise firing coordinates by methods of estimation instead of computing for precise values. The C&D system then activates additional weapons firing systems to compensate for this imprecision. The result is that additional guns are brought online to cover the larger firing box. The idea is that it is better to waste bullets than sink a destroyer.
This example shows why sometimes functional correctness might be sacrificed for timing correctness for many real-time systems.
Because one or a few missed deadlines do not have a detrimental impact on the operations of soft real-time systems, a soft real-time system might not need to predict if a pending deadline might be missed. Instead, the soft real-time system can begin a recovery process after a missed deadline is detected.
For example, using the real-time DVD player, after a missed deadline is detected, the decoders in the DVD player use the computed results obtained after the deadline and use the data to make a decision on what future video frames and audio data must be discarded to re-synchronize the two streams. In other words, the decoders find ways to catch up.
Resource-Scheduling Problem
So far, we have focused on meeting the deadline or the finish time of some work or job, e.g., a computation. At times, meeting the start time of the job is just as important. The lack of required resources for the job, such as CPU or memory, can prevent a job from starting and can lead to missing the job completion deadline. Ultimately this problem becomes a resource-scheduling problem. The scheduling algorithms of a real-time system must schedule system resources so that jobs created in response to both periodic and aperiodic events can obtain the resources at the appropriate time. This process affords each job the ability to meet its specific timing constraints.